 Send Email
Send Email

|
Authors | Institution |
|
Sara Alatrash Layla Alawwad Ala'a Alsaeed Fatimah Almughalleq Ala'a Abdrabalnabi |
Imam Abdulrahman Bin Faisal University |
 |
|
||||||
| Automated Closed-loop Intravenous Anesthesia Delivery Model using proportional-integral-derivative (PID) Controller |
Anesthesia is used during surgeries to suppress surgical stimuli in the central nervous system and results in the absence of sensation.
Anesthesia can be delivered in two methods, either Inhalational or Intravenous. In the intravenous method, the anesthetic drug is delivered to the central compartment which is the blood and then it moves to the effective site which is the brain.
Intravenous Anesthesia related statistics in the United States:
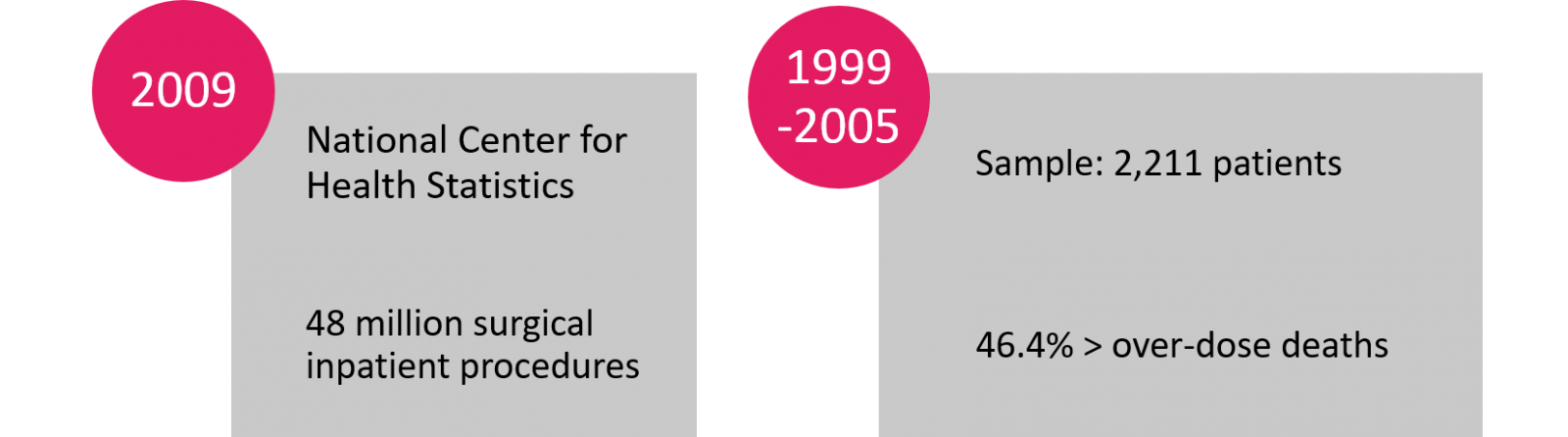
An automated closed-loop control design is essential to ensure that the dose is within acceptable confidence interval from a set point.
A Proportional, Integral, and Derivative (PID) controller is used to automatically deliver the Propofol anesthetic drug and control the depth of hypnosis level based on the patient’s consciousness feedback.
Potential advantages:
- Minimizing the human error that occurs during the injection of the anesthetic drug.
- Ensuring patient safety and reducing the risk of having an under- or over-dose of drugs.
- Minimizing drug consumption.
- Shortening post-operative recovery phases.
How to automate anesthesia?
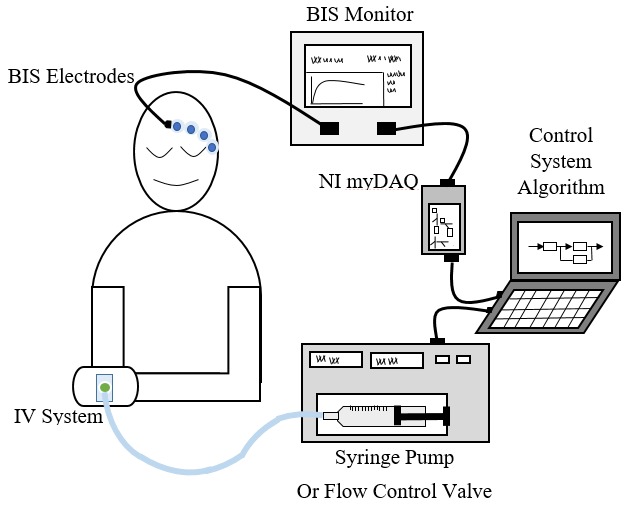
fig.1 Procedure for the Automation of the Intravenous Anesthesia Delivery.
A syringe pump delivers the anesthetic drug to the patient through an intravenous system. The unconsciousness effect of the drug on the patient can be monitored using electrodes placed on the patient’s forehead. These electrodes will measure the EEG signal and display the resulted data on a BIS monitor. The data then is transferred through the data acquisition device to the designed model that works to control the syringe pump.
Why PID in automating anesthesia?
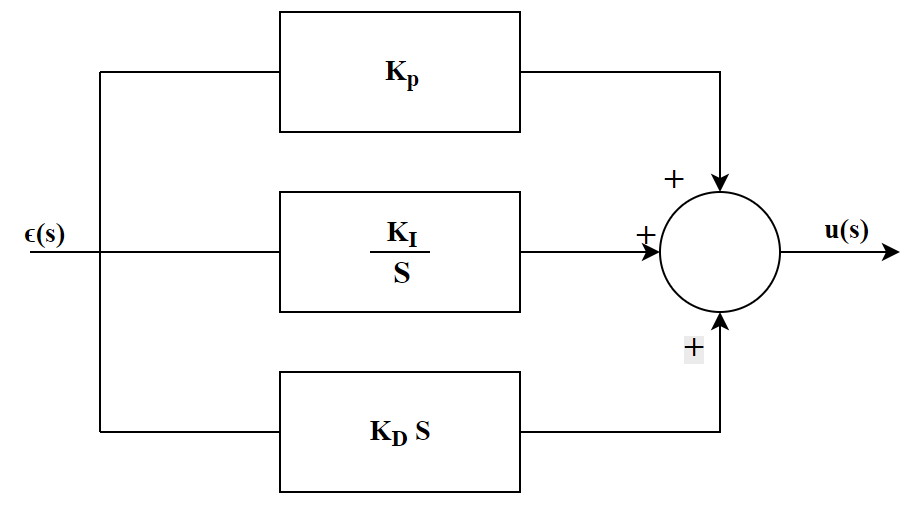
fig.2 PID controller
PID controllers consist of a Proportional KP, Integral KI, and Derivative KD parameters, those parameters are varied to get an optimal response.
More than 90% of the available controllers are PID controllers.
The control system is first simulated using MATLAB program to guarantee that the PID parameters are suitable before implementing the prototype.
The step response shown in fig.3 demonstrate the time behavior of the system’s output in accordance to the change of the system’s input.
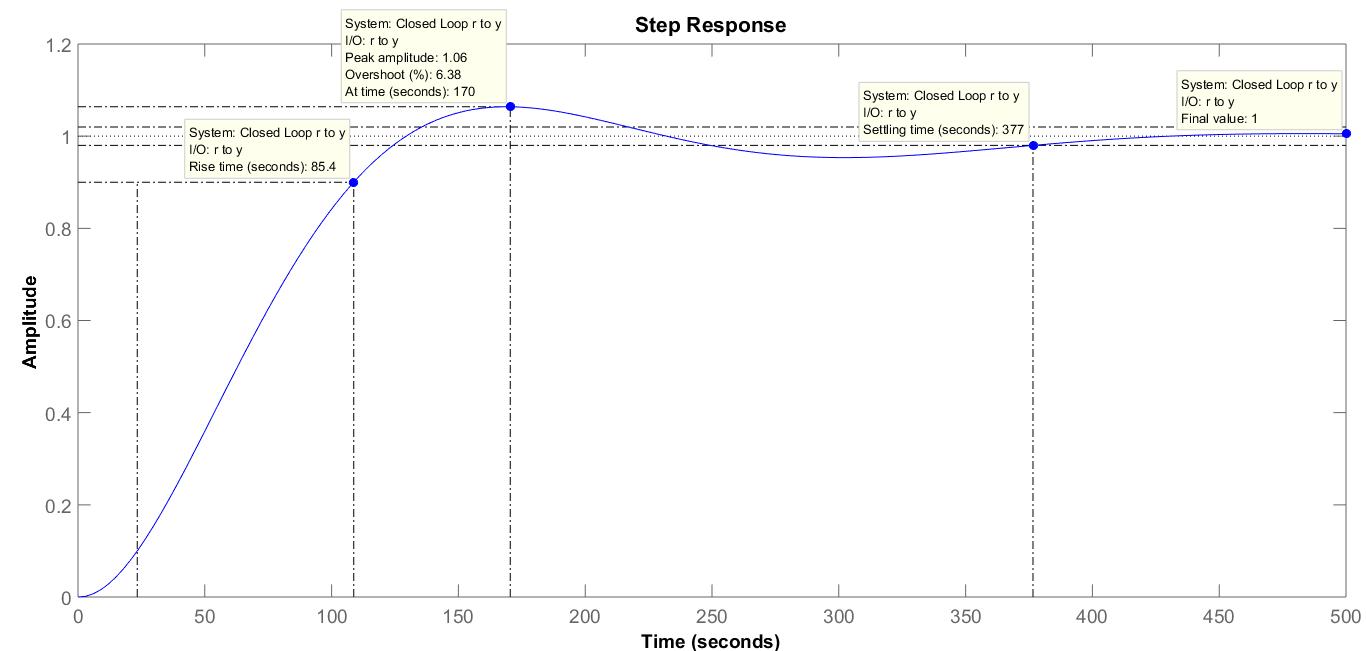
fig.3 Step Response Result In MATLAB
Table 1: System Characteristics in response to the tuned PID parameters
| System’s Characteristics | |||
| %OS | Ts | Tp | Tr |
| 6.38 | 377 s | 170 s | 85.4 s |
|
PID Parameters |
|||
|
kp |
ki |
kd |
Tsp |
|
2.08 |
0.0152 |
70.7 |
131.4 |
The Root Locus plot in the SISO tool shows the stability of the system when all the poles are on the left-hand plane as shown in fig.4.
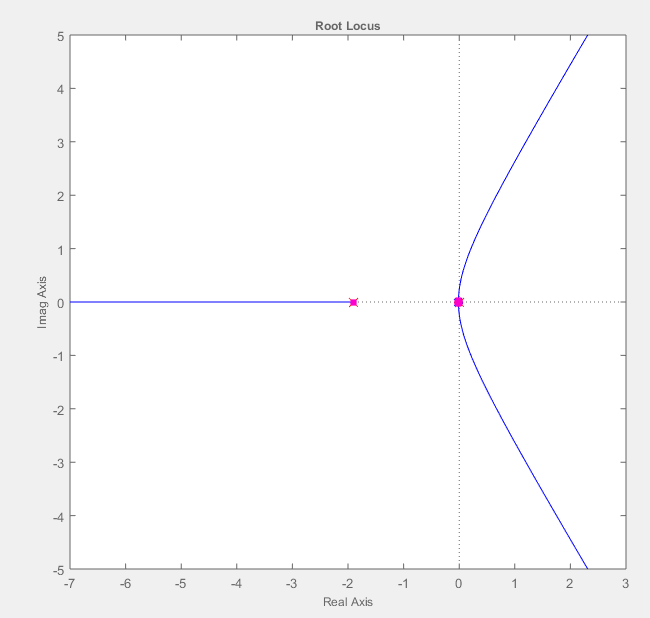
fig.4 Root Locus of the Tuned Parameters (stability).
The automated inhalational anesthesia devices have improved greatly and it is widely used nowadays. However, the automated IV anesthesia devices still need further improvement.
Special thanks to the supervisor Dr. Ibrahim Aljamaan, Co-supervisor Dr. Ibraheem Al-Naib, and the Biomedical Department at Almana General Hospital in Dammam.
The development of the automated closed-loop control system of intravenous-anesthesia is still in progress.
In this poster, a design for the closed loop model that controls the depth of anesthesia by a tuned Proportional, Integral, and Derivative PID controller is proposed.
The MATLAB simulation example and results are shown to ensure the effectiveness of the proposed model.
[1] G. A. Dumont, "Closed-Loop Control of Anesthesia - A Review," IFAC Proceedings Volumes, vol. 45, pp. 373-378, 2012/01/01/ 2012.
[2] G. A. Dumont, "Robust control of depth of anesthesia," International journal of adaptive control and signal processing, vol. 23, pp. n-a-n/a, 2008.
[3] J. Butterworth, D. C. Mackey, and J. Wasnick, Morgan and Mikhail's Clinical Anesthesiology, 5th edition: McGraw-Hill Medical, 2013.
[4] K. Soltesz, "Individualized PID control of depth of anesthesia based on patient model identification during the induction phase of anesthesia," ed, 2011, pp. 855-860.